


ČVUT v Praze, CertiCon a.s.
WP6 - Libor Přeučil
Robotický systém pro autonomní inspekční a dohledové mise
Výstup má formu demonstrační technologické jednotky pro úlohu autonomní inspekce a prohledávání neznámého prostředí. Laboratorní robot ER1 (Obr. 1.) byl vybaven hardwarovou částí navigačního systému (Obr. 2.) skládajícího se ze sensoru MS Kinect2 a minipočítače Intel NUC 5I5RYK.Software demonstrátoru byl vytvořen na platformě ROS (Robot Operating System), přičemž jeho základními moduly jsou:
– řídicí modul robotu ovládající motory a poskytující informaci o ujeté trajektorii ve formě odometrie
– modul RTAB-Map (Real-Time Appearance-Based Mapping) pro simultánní lokalizaci a mapování ve 3D využívající RGBD informaci z MS Kinect
– modul pro simulaci 2D scanu z RGBD dat MS Kinect
– modul EAPD pro realizaci prohledávání neznámého prostředí, který pracuje s polygonální reprezentací tohoto prostředí.
S výše popsaným systémem byla provedena řada experimentů ve vnitřním i vnějším prostředí demonstrujících schopnost systému se plně autonomně navigovat a vytvořit 3D mapu prostředí. Obrázky 3 a 4 zobrazují ukázky mapy budované během experimentu. Popis vlastního systému, video-záznam z provedených experimentů, pořízená data i výsledné 3D mapy prozkoumaného prostředí jsou dostupné na stránce http://imr.ciirc.cvut.cz/Research/EAPD.

Obr.1 – Laboratorní robot ER1

Obr. 2 – Navigační modul: MS Kinect2 a Intel NUC 5I5RYK
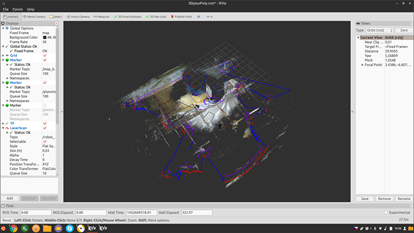
Obr.3 – Grafické prostředí zobrazující aktuální informace o prováděné misi

Obr. 4 – Ukázka budované mapy prostředí